| Motown21�g�b�v �� �Z�p�v�V �� �����ԋZ�p�g�����h |

| �@��26��@���N�T�XLS600h�̃A�N�e�B�u�X�^�r���C�U�t���T�X�y���V�����V�X�e�� |
|

|
�@���A�N�e�B�u���g�X�^�r���C�U�t���T�X�y���V�����V�X�e���̍쓮�T�O |
| �@���̃N���}�ɍ�p���鉡�����x�ɉ����āA�O��̃X�^�r���C�U�o�[�ɐ݂���ꂽ�A�N�e�B�u�X�^�r���C�U�A�N�`���G�[�^�ŃX�^�r���C�U�o�[�̝���p�x���œK�ɐ��䂵�ăT�X�y���V�����ɓ`����͂��ς����܂��B����ɂ���Đ��̃��[����ጸ���Ĉ��肵������p���ƍ������\���������Ă��܂��B�A�N�`���G�[�^�̋쓮�ɂ́ADC-DC�R���o�[�^�ō~�����ꂽHV�o�b�e���̓d�͂��g�p���Ă��܂��B�}�P�ɁA���̃V�X�e���̊T�O�}�������܂��B | 
|
�@����v�\�����i�Ƃ��̋@�\ |
| �@�}�Q�ɁA���̃V�X�e���̎�v�\�����i�̔z�u�������܂��B �@�@�t�����g�����A�A�N�e�B�u�X�^�r���C�U�R���s���[�^�F�X�e�A�����O�Z���T����̃X�e�A�����O���NJp�M������юԗ֑��Z���T����̎ԑ��M��������̃N���}�̃��[���p��}���邽�߂ɕK�v�ȃX�^�r���C�U�o�[����p�x�����Z���ă��[�^�[���쓮���܂��B �@�A�A�N�e�B�u�X�^�r���C�U�A�N�`���G�[�^�F��]�p�Z���T�A���[�^�[�A���[�^�[�V���[�g�����[�A�����@�\����\������Ă��܂��i�ڍׂ͌�q�j�B �@�BDC-DC�R���o�[�^�F�A�N�e�B�u�X�^�r���C�U�R���s���[�^����̓d�͗v���M���ɉ�����HV�o�b�e���̓d����288V����46V�ɍ~���V�e�A�N�e�B�u�X�^�r���C�U�R���s���[�^�ɋ������܂��B �@�CHV�o�b�e���F�A�N�e�B�u�X�^�r���C�U�A�N�`���G�[�^�̃��[�^�[���쓮���邽�߂̓d�͂�DC-DC�R���o�[�^�������܂��B �@�D�X�e�A�����O�Z���T�F�R���r�l�[�V�����X�C�b�`���ɐ݂����Ă���A�X�e�A�����O�z�C�[���̑��Ǘʂ���ё��Ǖ��������o���܂��B�Z���T���́A���m�M�A�ɓ������ꂽ���̉�]�����m����Q�g�̎��C��R�f�q�������A���m�M�A����]����Ƃ��̎��C��R�̕ω������o���ăX�e�A�����O�̉�]�Ƃ��ďo�͂���̂ł��B �@�E�ԗ֑��Z���T�F�S�ւɎ��t����ꂽ�ԗ֑��Z���T�ƃ��[�^�[�ŁA�ԗւ̉�]���x�����o���܂��B���[�^�[�̃S���ɂ͎��������[�U����Ă���A�~�������ɂm�^�r�ɂ��ϓ��ɔz�u�i�e48�Ɂj����Ă��܂��B���[�^�[����]����Ǝ���̕ω������܂�A������A�N�e�B�u�Z���T�����o���Ďԑ��p���X�Ƃ��ďo�͂��܂��B���̃A�N�e�B�u�ԗ֑��Z���T�́A��ʓI�ȃp�b�V�u�Z���T�ɔ�r���Ďԑ��O�q/h�t�߂���̌��o���ł��A�܂����[�^�[�̉�]���������o�ł���̂ŃN���}�̑O�i�E��ނ̔��ʂ��ł�����̂ł��B �@�F���[���[�g�Z���T�����j�A�f�Z���T�F�����͈�̂ɂ��ď��^�����}���A�Z���^�[�R���\�[�����Ɏ��t�����Ă��܂��B�f�Z���T�̓N���}�ɉ����x��������ƃ[���T���̃r�[��������݁A���̘c�݂��v�����ēd�C�M���ɒu����������̂ł��B�N���}�̑O������ɑ��āA���ꂼ��45�x�̌X���ɂȂ�悤�Ɏ��t����ꂽ�Q�̂f�Z���T�̑g�����ŁA���������̂��ׂĂɑ��Č����x�����m�ł��A���j�A�o�͓����Ƃ����܂��Ċe��̘H�ʂɑ��Ă��ߍׂ��Ȑ��䂪�ł���悤�ɂȂ��Ă��܂��B�܂����[���[�g�Z���T�́A���d�����̘c�ݗʂƕ����ŃN���}�̉����������̉�]�p���x�i���[���[�g�A���]���x�j�����o������̂ł��B �@�GVGRS�i�d���p���[�X�e�A�����O�j�R���s���[�^�F�d���p���[�X�e�A�����O�쓮�p�M�����A�N�e�B�u�X�^�r���C�U�R���s���[�^�֑��M���܂��B �@�H�T�X�y���V�����R���g���[���R���s���[�^�F�A�u�\�[�o�[�R���g���[���X�C�b�`�őI�����ꂽ�����̓��[�h�M�����A�N�e�B�u�X�^�r���C�U�R���s���[�^�֑��M���܂��B �@�I�X�L�b�h�R���g���[���R���s���[�^�F�ԑ��M�����A�N�e�B�u�X�^�r���C�U�R���s���[�^�֑��M���܂��B �@�J�R���r�l�[�V�������[�^�[�F�V�X�e���ُ펞�A���[�^�[���̃}�X�^�[�E�H�[�j���O�C���W�P�[�^�����v��_���A�}���`�C���t�H���[�V�����f�B�X�v���C�̕\���A�}���`�u�U�[�̐��������ĉ^�]�҂ɃV�X�e���ُ̈��m�点�܂��B |
|
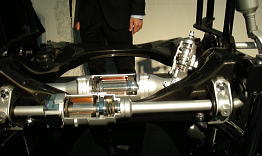
�@���A�N�e�B�u�X�^�r���C�U�A�N�`���G�[�^�̍\���ƍ쓮 |
| �@�O��̃X�^�r���C�U�o�[�̎���Ɏ��t�����Ă��܂��i�}3�A�}4�j�B���[�^�[�A���z�@�\�Ȃǂō\������Ă���A�O���t����Ԃ��قȂ���̂̍\���͓���̂��̂ł��B�}�T�ɁA���̃A�N�e�B�u�X�^�r���C�U�A�N�`���G�[�^�̍\���͎��}�������܂��B �@�����@�\�́A�T�[�L�����M�A�A�t���L�V�u���M�A����єg��������ō\������Ă���A�A�N�e�B�u�X�^�r���C�U�R���s���[�^����̐M���Ń��[�^�[����]����ƁA�g�������킪��]���ăt���L�V�u���M�A�ɔg���^���������܂��B����ɂ���ăT�[�L�����M�A�ƃt���L�V�u���M�A�̊ԂɈʑ������ł��āA���ꂼ��̃M�A�ɐڑ����ꂽ�����X�^�r���C�U�o�[�ƉE���X�^�r���C�U�o�[�������A�ڕW�Ƃ��郍�[���}���ƈ��肵���N���}�̎p����ۂ̂ł��B |
|
�b���Ƒ��p���b�g����c�[���W�b�����W�b�f�����bMOTOWN21�����Ljē��b���菤����@�\�L�b�v���C�o�V�[�|���V�[�b |
|
||
| ��236-0046 ���l�s����折���J��5-4-21 TEL:045-790-3037�@FAX:045-790-3038 |
| Copyright(C) 2005-2006 Tio corporation Ltd., All rights reserved. |